Observing Falling Motion
PROBLEM
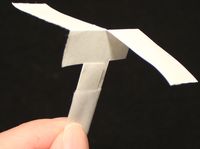
Our task was to design and construct a rotocoper that will take the longest time to fall to the ground from a height of 2 m and that will remain intact for three trials.
 See YouTube Video for tips on how to make a rotocopter:
See YouTube Video for tips on how to make a rotocopter:
>>> https://www.youtube.com/watch?v=5Vk-gXwHDSM
HYPOTHESIS
We believe that by making the blades of the rotocopter wide as well as long, only adding one paper clip, keeping the stem fairly short and using thin paper will help slow down the rotocopter’s fall. We can make these assumptions based on our experiences of constructing rotocopters in our last experiment. All of the above are independent variables which influence the rate at which the rotocopter falls (the dependent variable). We presume that with these small modifications, (i.e. making the rotocopter light, lengthening the blades) there will be more air resistance, therefore slowing down the fall of the rotocopter.
MATERIALS
· Paper (We used normal printing paper)
APPARATUS
-
Pencil
-
Ruler
-
Paperclip(s)
-
Scissors
-
Stop watch or a watch with a second hand
PROCEDURE
1. A rotocopter was built.
2. The rotocopter was dropped for 3 consecutive trials
each time at the from approximately 2 m above the ground.
3. Quantitative observations were made.
OBSERVATIONS
Our observations are recorded on the chart below.
|
Dimensions Used (approximate measurements) |
Trial #1 |
Trial #2 |
Trial #1 |
Average |
|
Normal printing paper – 28 x 22 cm Blades – 12.5 x 11 cm Stem – 8.5 x 21.5 cm (when unfolded)
|
3 |
2 |
4 |
3 |
CONCLUSION
Our hypothesis proved to be correct. Even though we experimented with many different types of rotocopters we found that the one with similar dimensions and large blades took the longest time to reach the ground. What we also found was that the more paper clips we attached to the rotocopter the more it descended with greater speed. The final conclusion we came to was that the air resistance was greater than the gravitational pull due to the lightweight paper we used to construct the rotocopter.